导语:卡尔曼滤波是一种利用线性系统状态方程,并且最终系统输入了输出观测数据,获得最优解答的算法。不过在观测过程中可能会有一定干扰,即使是最优结果也会有误差。下面就和探秘志具体了解下卡尔曼滤波。
卡尔曼滤波的具体原理
卡尔曼滤波是被斯坦利·施密特正式发现的,当时他在NASA埃姆斯研究中心的时候,发现自己的方法对于解决阿波罗计划的轨道预测是比较有用的,后来还根据研究最终发表了相关论文。
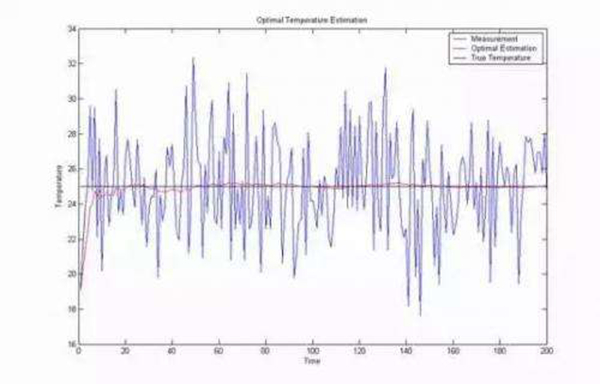
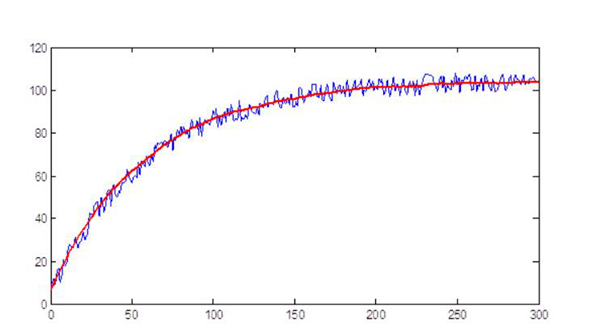
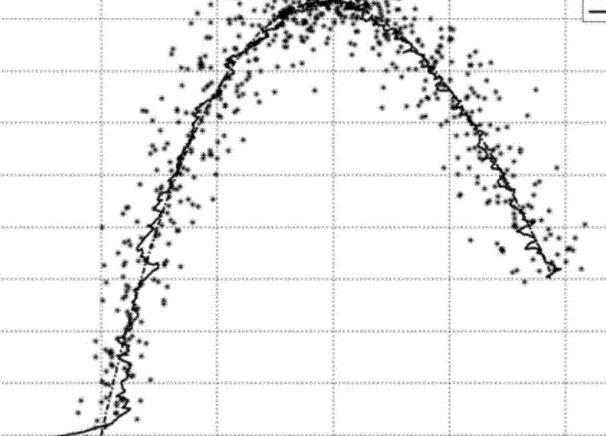
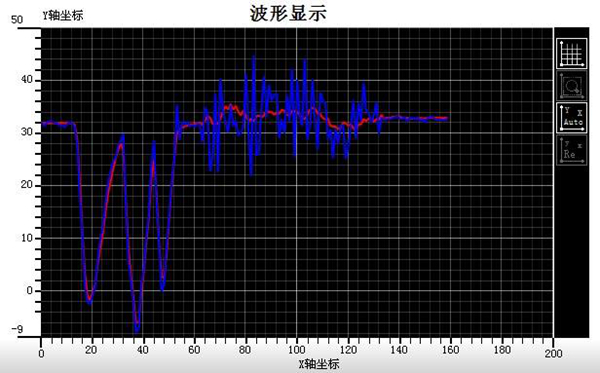
所谓的数据滤波是一种比较特别的,可以成功去除噪声还原真实数据的办法,这种特别的滤波在测量方差已知的时候可以更好的估计出动态系统。
卡尔曼滤波的完整体现
要知道传统的滤波方法,只能在信号和噪声有着不同频带的时候才可以真正实现。而卡尔曼滤波是一种比较新型的预测方法,比之前那种更加有效一些。
这种理论是在时间域上进行表述的,主要是在线性系统的状态空间的基础之上,最终可以求出系统状态的最优估计。最终就可以成功了解完整的行为。
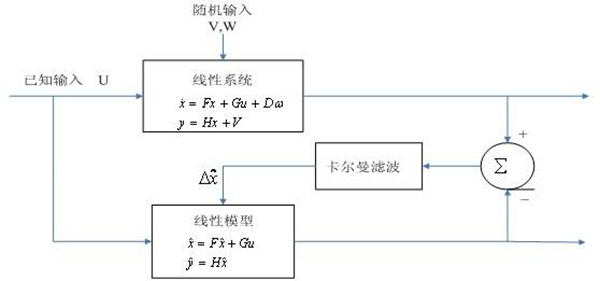
卡尔曼滤波不会要求信号和噪声都是平稳的,只要有一定的假设,并且最终将含有噪音的信号进行一定处理,就可以得到误差最小的估算结果,和以前相比要简单方便很多,所以也获得了很大认可。
自从卡尔曼滤波正式推出,在很多领域都有所运用,比如通信系统、电力系统、航空航天等等,最终也获得了很多成果。
结语:卡尔曼滤波在具体领域还是比较有用的,不过需要注意的是,这只是一种比较方便的算法,很多相关领域也是可以进行计算的。
相关推荐:
《财富》公布2022年度“改变世界的54家公司”,阿里、京东和美团进入前十
声明:《卡尔曼滤波的具体原理 卡尔曼滤波的完整体现》一文由排行榜大全(runsly )网友供稿,版权归原作者本人所有,转载请注明出处。如果您对文章有异议,可在反馈入口提交处理!







